Ensemble System Theory
Overview: Ensemble control is about using a common control input to simultaneously steer a large population (in the limit, a continuum) of dynamical systems. Ensemble control originated from quantum spin systems and finds numerous applications across various disciplines in science and engineering, ranging from neuroscience, social science, to robotics.
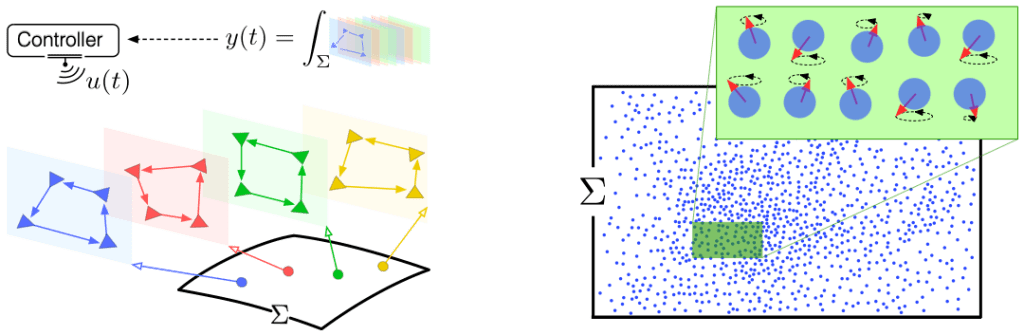
certain information of the individual states. Right: A continuum ensemble of spin systems, with unknown population density and unknown states, is regulated by common radio frequency impulses.
Driven by the emerging applications, there has been an active development in mathematical control theory for analyzing fundamental properties of continuum ensemble systems. We have made a number of pioneering contributions. Below are a few selected works:
- It is a long-standing open problem whether there exist controllable (or observable) linear ensemble systems over multi-dimensional parameterization space? In this paper, we have provided a negative solution and established a no-go theorem.
- Recurring patterns with high frequency are commonly referred to as motifs. Treating the individual systems as small networks, we have addressed in this paper the following problem: What type of motif is essential for ensemble controllability?
- The importance of Lie algebraic rank condition (LARC) has widely been appreciated in control theory. The ensemble version of LARC has recently been obtained, which is much more demanding than the standard one. It remains open when can this generalized LARC be satisfied? We have provided a solution in this paper.
- An implicit assumption underlies ensemble control is that the controller has perfect knowledge about the system. What if they do not? A more challenging yet practical scenario is that neither the states nor the population density is known. In this paper, we have addressed the problem about ensemble estimation and system identification.
Graphons and Structural System Theory
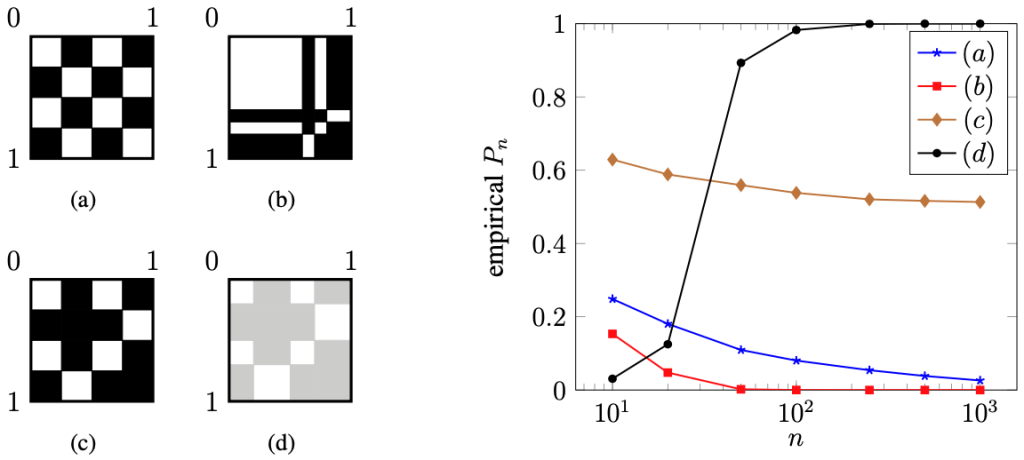
Overview: Graphons have recently been introduced to study very large graphs. They can be used as stochastic models for sampling graphs with heterogeneous edge densities. Structural system theory deals with the problem of understanding when a given network topology can sustain a prescribed system property, such as controllability and stability. The central topic of this interdisciplinary project is to investigate structural properties for extremely large network dynamic systems with random topologies, which arise from graphons and their variations.
More specifically, we sample random graphs from a given graphon, and evaluate the probabilities that these graphs can sustain a desired system property. A particular focus of our research is on the asymptotic regime where the random graph order (i.e., the number of nodes in a graph) goes to infinity. It has been observed that the probabilities tend to either one or zero, for almost all graphons. Check out our recent paper for a geometric characterization of the “zero-one” property!
Spacecraft Guidance
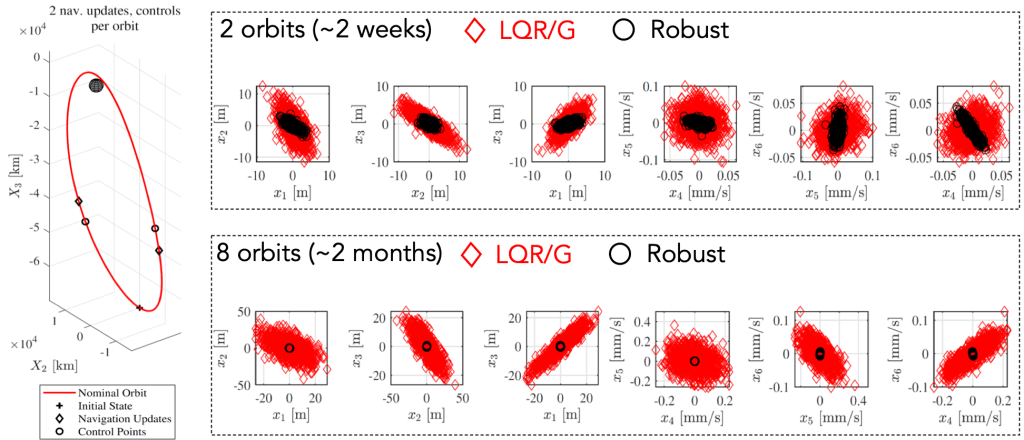
Overview: The number of low-cost missions in cislunar and deep space is rapidly growing. Spacecraft autonomy faces multiple challenges which arise from large uncertainties and operational constraints. At the current stage, navigation updates often involve a human in-the-loop and are planned in an ad hoc manner. However, autonomous guidance is necessary when continuous human input is impractical or becomes prohibitively expensive. The goal of this project is to design robust guidance laws that can mitigate negative impacts of uncertainties and have the potential for onboard implementation.
In recent works, we have investigated stochastic systems with both additive and control-dependent noise, and with sampled measurements and impulsive control inputs. The motivation came from the growing utilization of continuous, low thrust electric propulsion engines: Experimental studies indicate that these devices experience discharge current fluctuations that are proportional to the commanded thrust.
- In this paper, we have solved an optimal control problem of steering the stochastic system to reach final states, minimizing mean squared deviation from the target states, with only limited measurements at disposal.
- The research findings have led to a robust neighboring guidance law for multiple scenarios pertinent to current and planned space missions, including asteroid Sun-terminator orbits and near-rectilinear halo orbits in the Earth-Moon system. Check out this paper.
Analysis, Modeling, and Control of Network Systems
We have been working on various topics in the area of network systems, including formation control, opinion dynamics, distributed computation, regulation of gene networks, etc. For detail, please see publications.