The control system for the drone was implemented using Simulink. Due to COVID-19 we were forced to move away from running any tests on the drone so a simulation was developed using the same control system. 
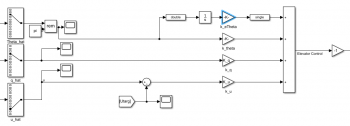
Optimal State Feedback Control
The controller was designed by decoupling the system into four single input single output (SISO) systems controlling the virtual inputs TEAR (Throttle, Elevator,Aileron, and Rudder). The SISO systems for Throttle, Aileron, and Elevator were stabilized using integral control. The integral control in Throttle was used to regulate a constant command in altitude. The Elevator and Aileron systems used integral control to regulate their respective Euler angles to zero.

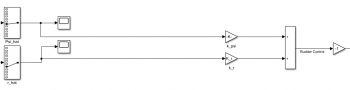
Trajectory Control
In order for this project to be of any use,the drone must be able to follow a predetermined path. Proportional navigation was used for guidance and navigation (shown below). This iterates through a set of way-points and produces targets for the closed loop feedback controller. Once the drone is close enough to the current way-point, the next way-point is selected and new targets are set.
